
Estimated reading time: 6 minutes
Research into head movements can provide insights into a wide range of topics, including non-verbal communication, attention, and human-computer interaction. In addition, studying head movements can be useful in the diagnosis and management of neurological disorders, as abnormal head movements can be indicators of conditions such as Parkinson’s disease and concussion.
In a previous blog, we have explained concepts and terminology relevant to measuring gaze, and here we provide an overview of concepts important to measuring head movements. These include the Cartesian coordinate system, the concepts of translation and rotation, and “six degrees of freedom” (6DOF) head position data.
The Cartesian Coordinate System
Head tracking data is often described in a three-dimensional Cartesian space with three axes, X, Y, and Z, that are perpendicular to each other. Typically, the X-axis is horizontal (see Figure 1). However, the orientation of the Y- and Z-axis can depend on the discipline or context, with either the Y- or Z-axis pointing vertically or forward-backward. In Figure 1, the left image illustrates a vertical, up-down Y-axis and a forward-backward Z-axis, while the right image depicts the opposite.
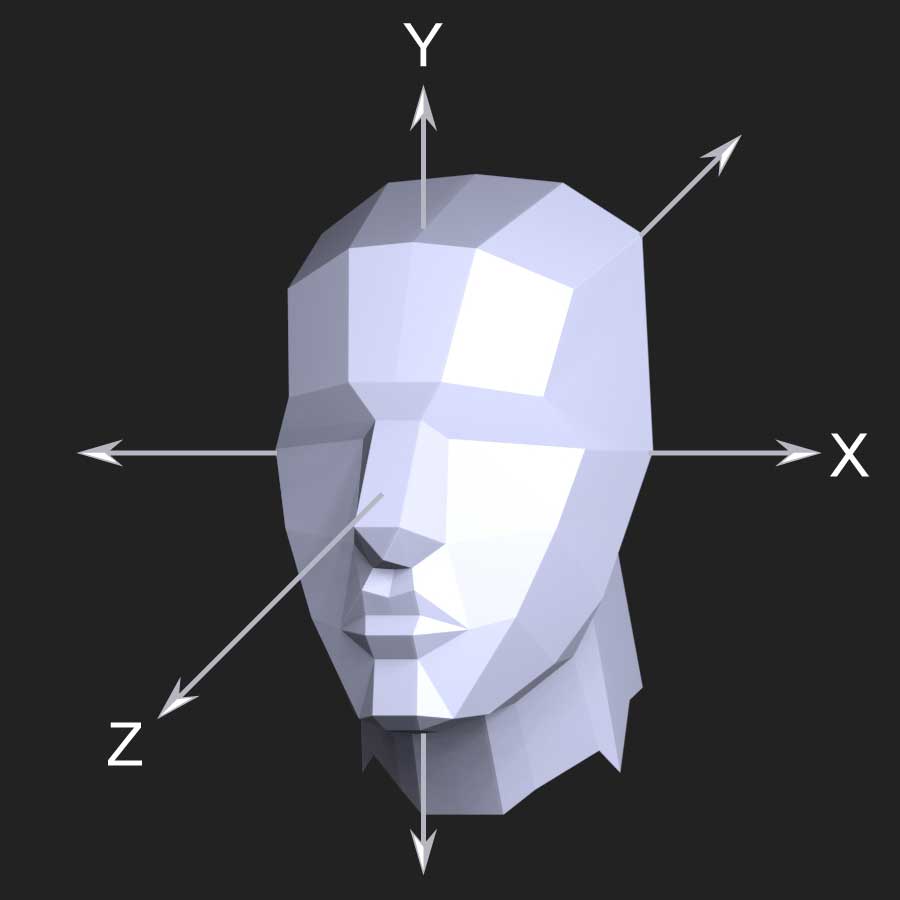
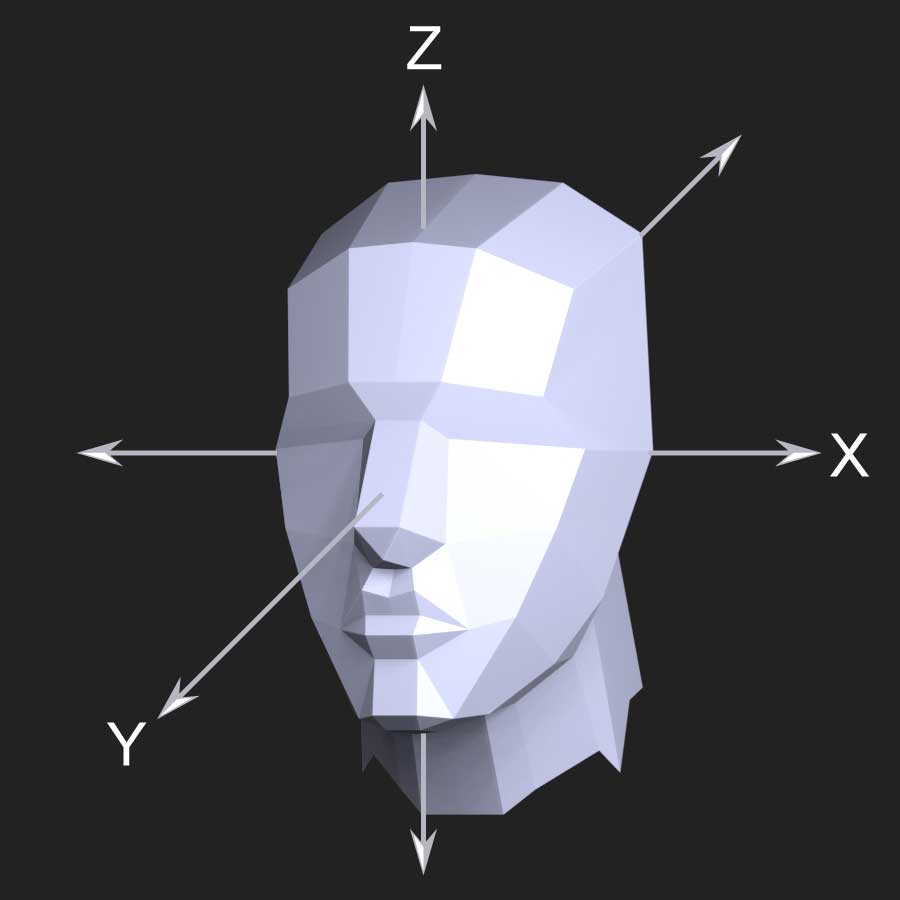
Figure 1: Cartesian X-, Y-, Z-axes. On the left, the X-axis is horizontal, the Y-axis is vertical, and the Z-axis points forward and back. On the right, the Y- and Z-axis are interchanged.
In a Cartesian coordinate system, the three axes (X, Y, and Z) go through a common origin (O) as pictured in Figure 2, where X = 0, Y = 0, and Z = 0. For each axis, tick marks are one unit length apart, and the origin is the dividing point between positive and negative numbers.
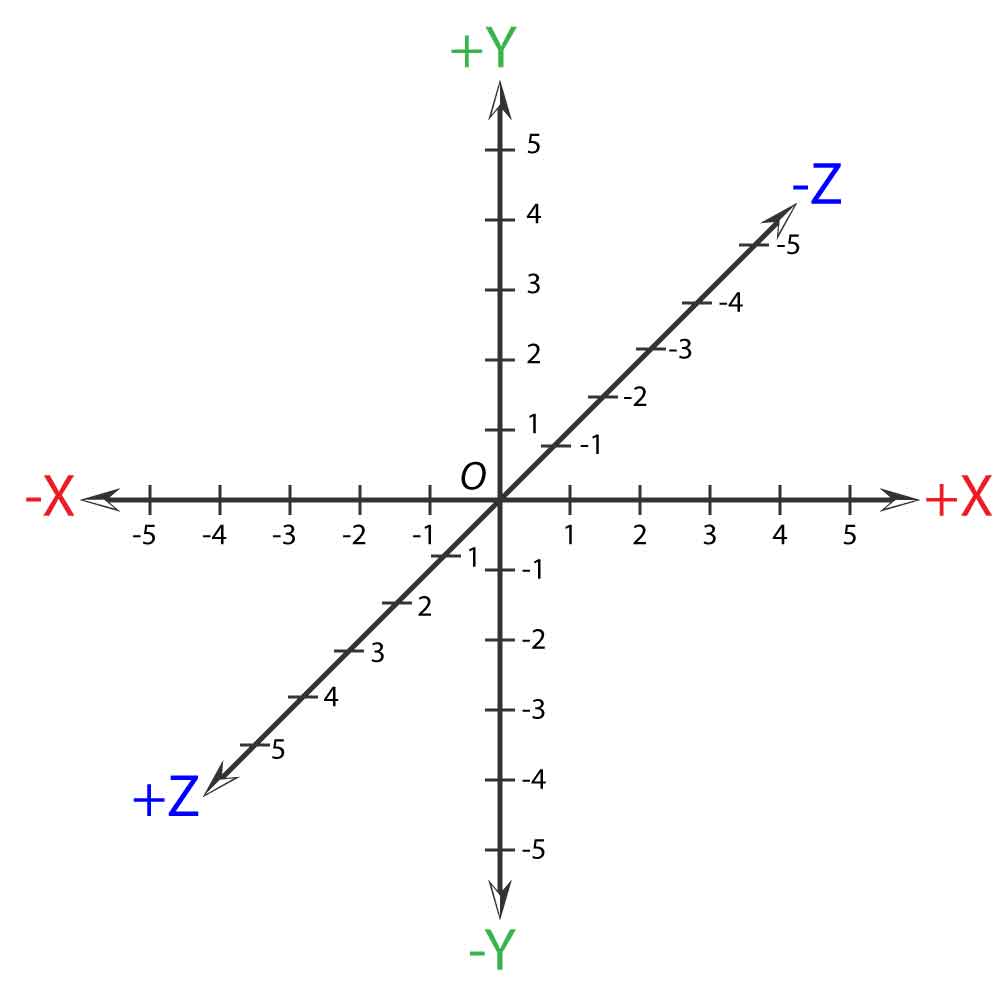
Figure 2: Three-dimensional Cartesian coordinate system, with origin O and axis lines X, Y, and Z. Axes tick marks are one unit length apart.
6 Degrees of Freedom (6DOF) Head Tracking
In head tracking research, degrees of freedom (DOF) refers to the number of independent ways that the head can move in three-dimensional space. The head is free to change position through translation – movement along the three axes of the Cartesian coordinate system, as well as by rotation around the same three axes. Thus, any head pose in three-dimensional space can be described with three translational values (X, Y, and Z coordinates) and three corresponding rotational angles, providing 6 data points in total.
In head pose research, the rotation angles are typically referred to as pitch, yaw, and roll.
- Pitch is the rotation around the X-axis (as when we nod our head “yes”).
- Yaw is the rotation around the Y-axis (as when we shake our head “no”).
- Roll is the rotation around the Z-axis (as when we make side-to-side neck stretches).
The left image in Figure 3 provides a dynamic representation of the three translational movements along the X, Y, and Z axes. The right side in Figure 3 provides a dynamic representation of the three rotational movements around those axes – pitch, yaw, and roll.
Figure 3: On the left, positional motion along the X, Y, and Z axes. On the right, rotational motion of pitch, yaw, and roll.
EyeLink 3 Head Tracking Data
In our new head-mounted eye tracking system, the EyeLink 3, 1000 Hz 6DOF head position data is provided alongside the usual gaze data. The system uses a unique infrared (IR) marker device which is placed above or below the tracked area.
In Figure 4, the X, Y, Z axes on the monitor reflect the fixed- or space-coordinate system of the tracker, with its origin at the screen center, the X and Y-axis on the display surface (X-axis positive to the right, Y-axis positive upwards), and the Z-axis going through the screen. The X, Y, Z axes on the headset reflect the headset coordinate system which translates and rotates with respect to the fixed (or space) coordinate system. All head rotation angles and head position coordinates (e.g., the 6DOF head data) represent the relationship between these two coordinate systems, reflecting the location / orientation of the headset with respect to the location / orientation of the 2D screen plane. From the interplay between the two systems, the EyeLink 3 provides head position data in mm and rotation data in degrees. The system also provides a unique pixel based measure of head pose, as described in this blog.
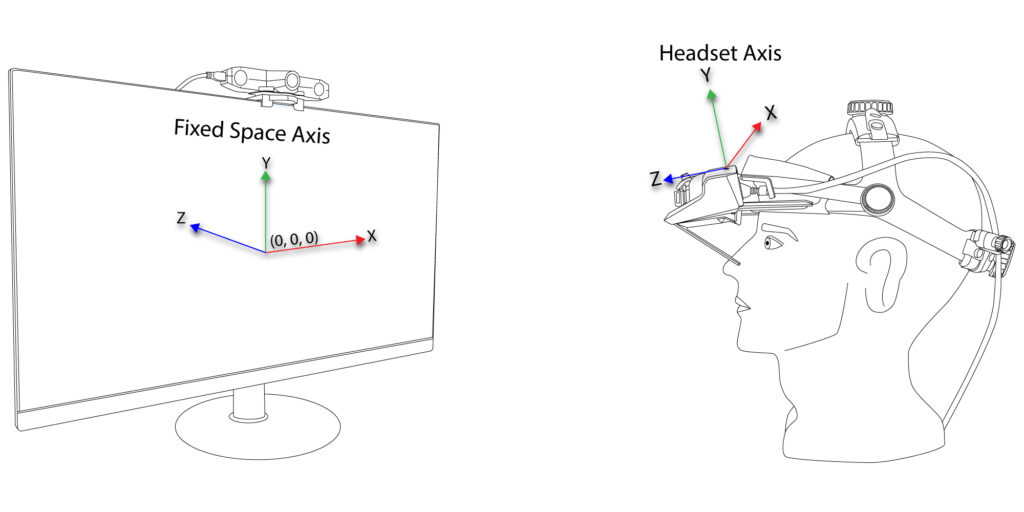
Figure 4: EyeLink 3 setup of the screen and observer. Two Cartesian coordinate frames are used to calculate 6DOF head data. The fixed space frame has its origin (0, 0, 0) at the center of the monitor, and the headset frame has its origin above the camera.
Combined Eye and Head Data
Simultaneously recording both eye movements and head movements has the potential to provide important insights into the study of human behavior and coordination. For example, common laboratory based eye tracking tasks such as reading or visual search are typically accompanied by head movements when performed in the real world, but the contribution of head movements to task performance is rarely considered by researchers. In addition, difficulties in our ability to coordinate eye and head movements could potentially provide insights into neurological and psychiatric disorders.
Contact
If you would like more information on the EyeLink 3, you can call us (+1-866-821-0731 or +1-613-271-8686) or click the button below to email:
 How to Tell if Someone is Lying
How to Tell if Someone is Lying